RflyPilot飞控支持将飞行数据通过UDP实时显示在计算机上。本节将以SIH仿真为例介绍示波器系统的基本功能与使用方法。
RflyPilot的在线示波器
RflyPilot在飞控系统底层支持将一些关键数据传输到远程计算机上。这些数据的类型已经预定义在飞控底层代码中,如需修改,需要自行修改飞控源码,该示波器叫做system scope。可由配置文件rflypilot.txt进行配置开启或者关闭。另一种示波器为controller scope,该示波器用于输出与控制器有关的数据,这些数据的定义可以由开发者自行决定。两种示波器的默认数据更新频率为100Hz,可能受系统运行影响而略有浮动。
系统示波器
system scope中包含较为丰富的系统状态信息,包括位置、速度、姿态、控制量、运行频率等。RflyPilot通过本机的UDP3333端口向局域网广播数据,该数据为一数组,其定义为
#define SCOPE_DATA_N 40
typedef struct
{
uint64_t timestamp;
uint32_t rate_hz;
float data[SCOPE_DATA_N];
}scope_data_typedef;
ringbuffer_typedef<scope_data_typedef> system_scope_msg(20,"system_debug_data",LOG_DISABLE);
Tip
注:关于system scope的具体定义,请参考RflyPilot源码文件src/msg/msg_def.h。
该示波器具体信息可以参见如下代码,其中_system_debug_data为示波器数据。
_system_debug_data.data[0] = 1234; //帧头
_system_debug_data.data[1] = get_time_now() / 1e6; //时间戳
_system_debug_data.data[2] = _att.roll; //滚转角
_system_debug_data.data[3] = _att.pitch; //俯仰角
_system_debug_data.data[4] = _att.yaw; //航向角
for(i = 0; i < 3; i++)
{
_system_debug_data.data[i+5] = _gyro.gyro[i]; //陀螺仪数据(滤波后)
}
for(i = 0; i < 3; i++)
{
_system_debug_data.data[i+8] = _accel.accel[i]; //加速度计数据 (滤波后)
}
for(i = 0; i< 3; i++)_system_debug_data.data[i+11] = _lpe.pos_ned[i]; //NED位置(估计)
for(i = 0; i< 3; i++)_system_debug_data.data[i+14] = _lpe.vel_ned[i];//NED速度(估计)
for(i = 0; i< 3; i++)_system_debug_data.data[i+17] = _gps.pos_ned[i];//NED位置(GPS)
for(i = 0; i< 3; i++)_system_debug_data.data[i+20] = _gps.vel_ned[i];//NED位置(GPS)
for(i = 0; i < 4; i++)_system_debug_data.data[i+23] = (float)_actuator_output.actuator_output[i];//PWM输出
_system_debug_data.data[27] = actuator_output_msg.publish_rate_hz;//控制器频率
_system_debug_data.data[28] = cf_output_msg.publish_rate_hz;//姿态估计频率
_system_debug_data.data[29] = lpe_output_msg.publish_rate_hz;//位置估计频率
_system_debug_data.data[30] = accel_msg.publish_rate_hz;//IMU消息发布频率
_system_debug_data.data[31] = mag_msg.publish_rate_hz; //磁力计消息发布频率
_system_debug_data.data[32] = baro_msg.publish_rate_hz;//气压计消息发布频率
_system_debug_data.data[33] = _baro.temperature;//温度(气压计)
_system_debug_data.data[34] = _baro.pressure;//气压(气压计)
_system_debug_data.data[35] = _rc_input_msg.channels[0];//遥控器输入CH1
_system_debug_data.data[36] = _rc_input_msg.channels[1];//遥控器输入CH2
_system_debug_data.data[37] = _mag.mag[0];//磁力计数据x轴
_system_debug_data.data[38] = _mag.mag[1];//磁力计数据y轴
_system_debug_data.data[39] = _mag.mag[2];//磁力计数据z轴可见,利用该示波器一次最多显示40个通道数据。
配置
RflyPilot端
RflyPilot端仅需要修改配置文件config/rflypilot.txt,首先需要启用系统日志sys_scope_en = 1,为1表示启用系统示波器,为2表示禁用系统示波器。最后设置station_ip与scope_ip为计算机IP,注意加引号。
sys_scope_en = 1
scope_ip = "192.168.199.152"Warning
注:在配置项所在行,不能增加注释等无关内容,注意=两端的空格。
至此,RflyPilot端配置完成。
电脑端
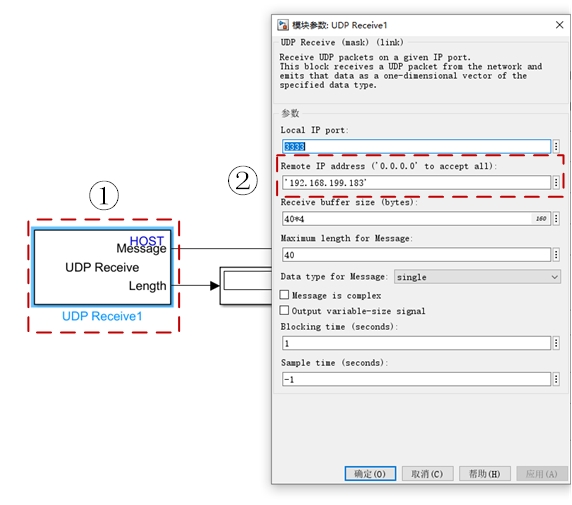
打开RflyPilot的Simulink工程文件,并打开debug_tools/udp_recv3_ke.slx。双击打开①后,配置②Remote IP address,该IP应设置为RflyPilot的IP。点击“确定”即可完成设置。
使用
运行./rflypilot,并启动示波器,通过遥控器进行操作即可。

控制器示波器
控制器示波器controller scope也使用了与系统示波器同样的原理实现。控制器示波器同样具有40个浮点数通道。其配置方法与系统示波器类似,这里不做过多展开。其主要区别是controller scope使用了UDP3334端口。开启控制器示波器需要设置ctrl_scope_en = 1。
Tip
为避免系统资源浪费,建议将未使用的示波器设置为关闭。
配置自定义示波器数据
controller scope的数据输出端口在控制器模块中,在Simulink模型的MPC_HIL/usrcontroller (MPCControllerCodeGen_Vz)中,有预定义一输出端口,如下图中②所示。

它在Simulink中的定义如下,双击设置①,将③data加入到④要赋值的元素中,并“确定”。此时模块①将会增加一端口用于输入数据,维度为40。

_s_scope_s的数据定义同RflyPilot代码中一致
#define SCOPE_DATA_N 40
typedef struct
{
uint64_t timestamp;
uint32_t rate_hz;
float data[SCOPE_DATA_N];
}scope_data_typedef;
scope_data_typedef _controller_debug;为了演示方便,这里增加一脉冲发生器和常数模块,如下图所示

随后进行代码生成与部署即可,这部分已经在快速开始中介绍过了,这里不再赘述。
电脑端
电脑端仅需将UDP端口修改为3334即可,如下图所示,然后选择需要接收的数据通道。

在此直接进行SIH仿真,即可得到从控制器模块中自定义的数据输出,如下图所示。

不难发现,方波信号并不规整,原因是控制器的运行频率与示波器数据发送的频率异步,示波器的运行频率约为100Hz,而控制器约为333Hz,故出现此问题,这也属于正常现象。