本小结将对常用的三种仿真模式(MIL\SIH\HIL)进行操作介绍。
MIL
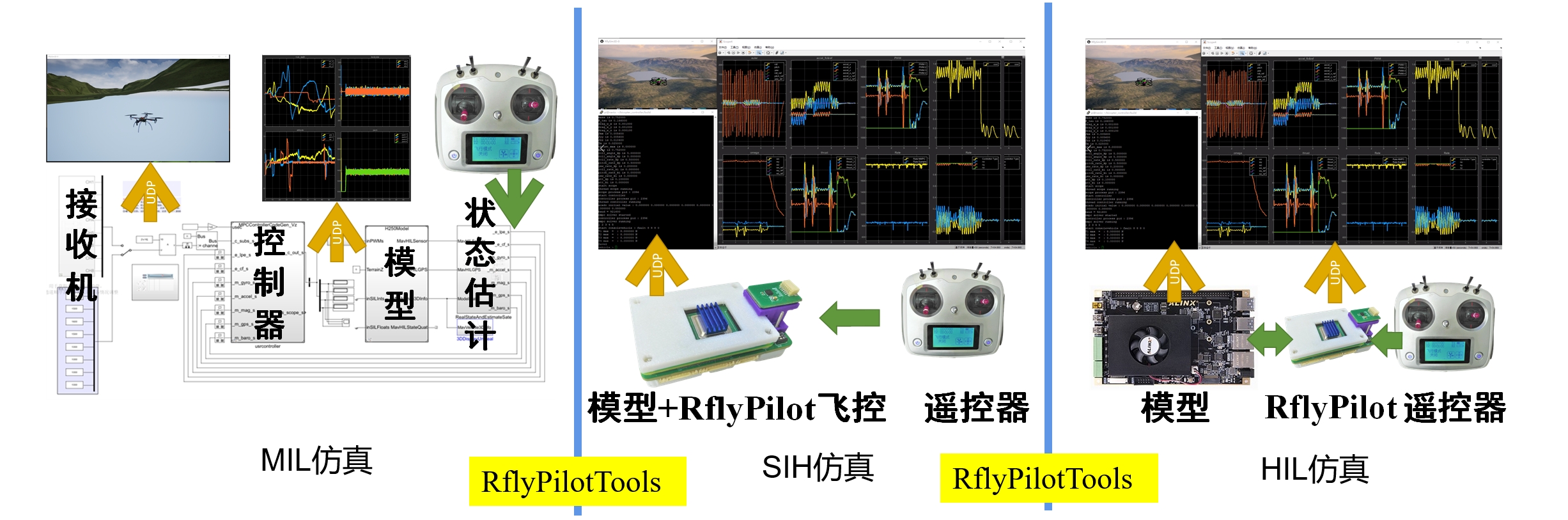
MIL仿真,即模型在环,该仿真模式主要用于进行控制系统的初期验证阶段,用于评估控制器的可控性。利用RflyPilot工程文件夹下的MIL/MPC_HIL.slx即可进行MIL仿真。这部分仿真主要在Simulink中进行,其仿真方法,这里不再赘述,具体内容由读者自行决定,相应的内容可以参考快速使用中的部分内容。
SIH
SIH仿真,即仿真器在环,该仿真模式主要用于测试控制器在真实嵌入式系统中的表现。SIH的仿真步骤在快速使用中进行了详细介绍,这里也不再赘述。
HIL
HIL,即半物理仿真,一般作为实飞实验的最后一步,在这个模式中,RflyPilot将直接连接到硬件在环实时仿真系统上,其硬件连接方法请参考硬件连接一节中的内容。
在HIL仿真中,仿真操作与SIH基本相同,不同的是需要修改valid_mode = 2,同时修改宏定义文件config/configure.h中的USE_RFLYPILOT为0。
#define POLL_TIME_US 10*1000// 10*1000ns = 10us
#define TIMER_TICK_RATE 2000
#define SCOPE_DATA_N 40
/* Estimator Thread Core */
#define ATT_EST_CORE 2
#define POS_EST_CORE 2
/* Sensor Thread Core */
#define IMU_CORE 2
#define MAG_CORE 2
#define BARO_CORE 2
#define GPS_CORE 2
/* Control Thread Core */
#define SUBS_CORE 2
#define BASIC_CTRL_CORE 2
#define CTRL_CORE 3
/* SIH Thread Core */
#define SIH_CORE 2
/* Serve Thread Core */
#define SCREEN_CORE 1
#define CONSOLE_CORE 1
#define LOG_CORE 1
#define ULOG_CORE 1
/* Rate Div */
#define USING_THREAD_SYNC 0
#define IMU_LPE 1
#define LPE_ATT 1
#define ATT_CTRL 2
#define USE_RFLYPILOT 0
#define USE_ONESHOT_125 1
#define OFFBOARD_DATA_N 20
#define PWM_FREQ (USE_ONESHOT_125==1?1500:400)
#define SERVO_PWM_FREQ 333
#define I2C_BUS_1 "/dev/i2c-1"
#define I2C_BUS_0 "/dev/i2c-10"
#define TASK_SCHEDULE_DEBUG 0最后重新编译上传即可。
注意
由于半物理仿真平台的PWM信号支持标注400HzPWM和Oneshot125,使用者可以根据需要修改该文件进行适配。默认配置为Oneshot125,如需修改为400Hz的PWM,可以设置USE_ONESHOT_125 0。
EXP
EXP,即实飞实验模式,在该模式下,RflyPilot将利用真实的传感器数据计算控制输出,并直接输出PWM控制指令。为启用该模式,读者需要修改valid_mode = 3,同时修改宏定义文件config/configure.h中的USE_RFLYPILOT为1。在该模式下,需要开发者自行连接飞控到飞行器上,包括电源模块、GPS、接收机、电调等。
注意
由于实飞实验使用了真实的GPS,需要等待状态估计系统收敛后才可以起飞,尤其是当飞控需要用到估计的位置、速度数据的情况。当控制台出现“[lpe] GPS Init status xxx, GPS Alt Origin is xxx”后,说明位置速度数据可用。
如下图所示,这是一架搭载RflyPilot的四旋翼无人机

实飞效果如下
